発表のポイント
- 絡まり合って塊を形成するイトミミズの群れが地面の凹凸を利用して移動することを発見しました。
- 「絡みつき」を表現した数理モデルを構築し、シミュレーションで振る舞いを再現しました。
- たくさんの「やわらかい」ロボットが協調して変幻自在に機能を発揮する、新しい工学システムの実現につながると期待されます。
概要
太さ0.3 mm、長さ10 − 40mm程度の小さなミミズであるイトミミズは、しばしばその柔軟な身体をくねらせ、たくさんの個体が互いに絡まり合って団子のような塊(かたまり)を形成します。このイトミミズの塊は、あたかも一つの生き物であるかのように、状況に応じて形を変えながら動き回ります。
東北大学電気通信研究所の加納剛史准教授、大学院博士課程の三上大志氏(研究当時)、脇田大輝特任助教、石黒章夫教授、広島大学の小林亮名誉教授(元広島大学大学院統合生命科学研究科)の研究グループは、行動観察実験、数理モデリング注1、シミュレーションを通して、イトミミズの塊注2が地面の凹凸を利用して移動するしくみを世界で初めて明らかにしました。
この成果は、動物の群れが複雑なデコボコした自然界で動き回るしくみの理解のみならず、たくさんの「やわらかい」ロボットが協調して変幻自在に機能を発揮する、新しい工学システムの実現につながると期待されます。
本研究成果は、2023年8月29日(日本時間15時)に科学誌Frontiers in Neurorobotics電子版に掲載されました。
詳細な説明
研究の背景
動物の群れは、各個体の動きを指示するリーダーがいなくても互いに動きを協調させ、環境に応じて動きを変えることができます。その中でも、イトミミズやブラックワームなどの細長くやわらかい身体を持つ動物の群れは、個体同士が絡まり合って塊を作り、その塊が環境に応じて変幻自在に形を変えながら動き回るという、大変興味深い特徴を持っています。 このような個体が絡まり合って塊を作る動物の群れに関する研究は既にありましたが[1、2]、いずれも平らな地面上の動きを扱っており、デコボコした自然界で動き回るしくみはわかっていません。
今回の取り組み
そこで研究グループは、イトミミズの塊に着目し、行動観察実験ならびに数理モデリング、シミュレーションを通して、塊が地面の凹凸のある環境下において移動するしくみの解明を試みました。
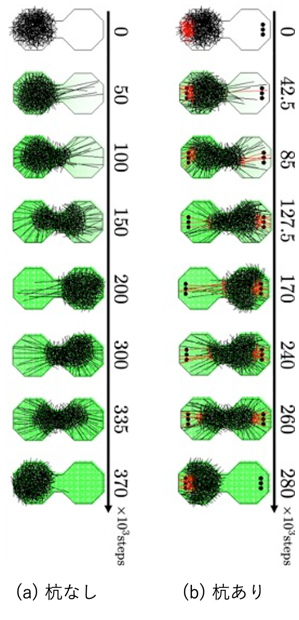
まず、鉄アレイ型のケースをたくさん作り、一方のグループには床に杭(くい)を立て、残りのグループには何も立てず、それぞれのケースにイトミミズの塊を入れました。その結果、塊はケースの二つの部屋を行き来し、杭ありのグループのほうがすばやく移動することがわかりました(図1a, b)。このケース内の移動は、まず半球状の塊が細長くなり、ある個体が杭に絡みつくとそこに塊が引き寄せられるようにして、起こっていました。
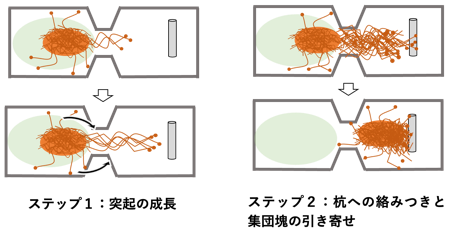
以上の行動観察から、研究グループは、次のようなしくみにより塊が移動していると考えました(図2)。
- ステップ1: 塊の中のある個体が塊の外側に頭部を向ける。その個体に他の個体が次々と絡みつき、塊が突起を形成する(図1c)。
- ステップ2: 突起が杭に到達すると、続々と他の個体が引き寄せられて杭に絡みつき、それらが塊全体を引き寄せる。
このしくみを数理モデルで表現し、シミュレーションしたところ、行動観察結果を再現することができました(図3)。この結果は、地面の凹凸を活用したイトミミズの塊の移動が上記のしくみで起こっていることを示唆しています。
今後の展開
本研究成果は、動物の群れが複雑なデコボコした自然界で動き回るしくみの理解につながります。また、本研究は工学的な意義も有しています。ロボットが多数集まり協調して動く群ロボット注3のシステムはこれまでにも開発されてきましたが、それらはいずれも硬い素材でできたロボットの集団でした[3]。本研究は、たくさんの「やわらかい」ロボットが協調して変幻自在に機能を発揮する、新しい工学システムの実現につながると期待されます。
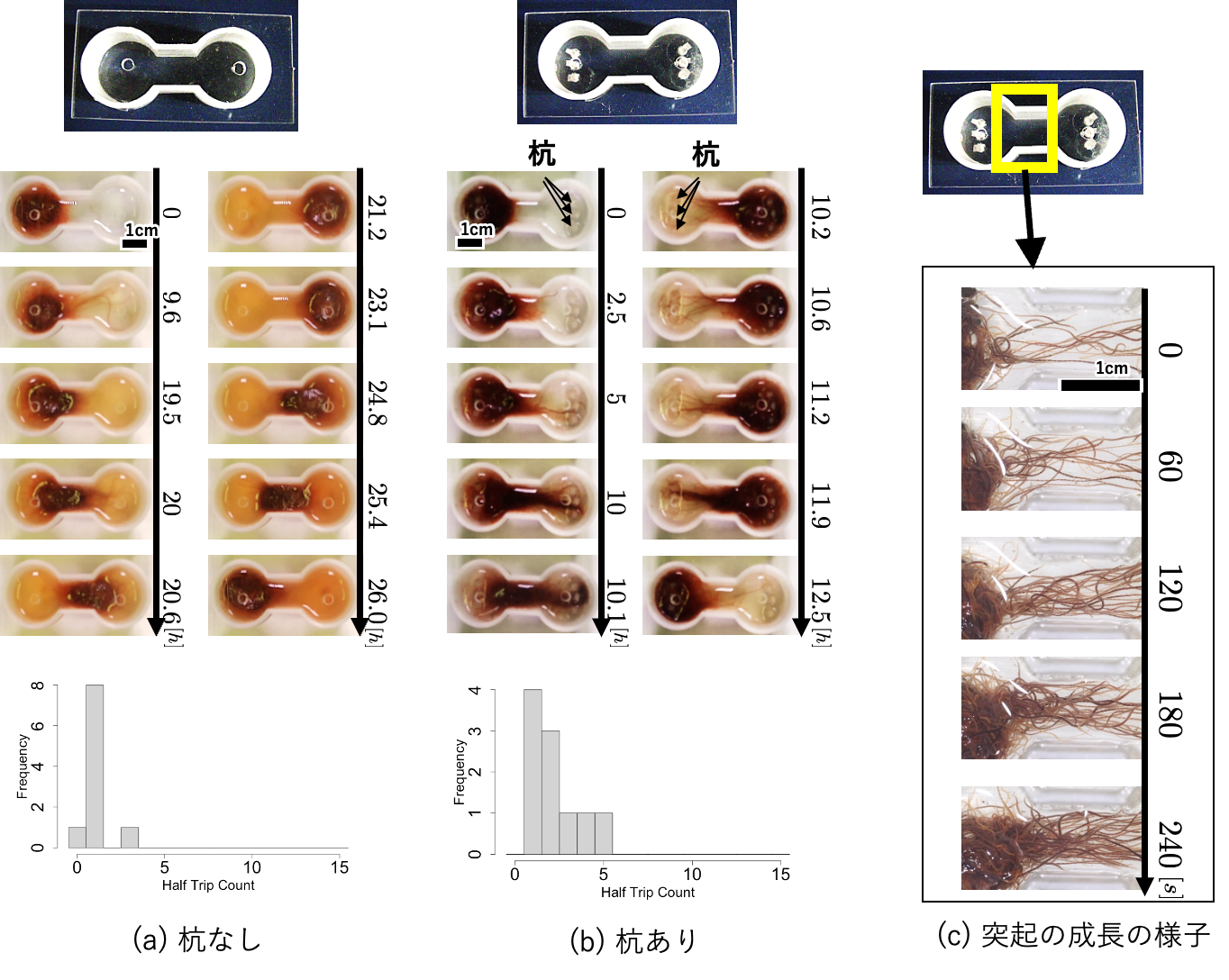
図1. (a)杭なし、(b)杭ありの鉄アレイ型のケースにイトミミズの塊を入れ、1試行あたり66時間、10試行観察した。左下のグラフは、 1試行あたりに片道移動した回数を示しており、杭ありのほうが多く移動していることがわかる。(c)は突起の成長の様子を示す。
図2. 行動観察実験をもとに研究グループが推測した塊の移動のしくみ(本文参照)。
図3. シミュレーション結果。行動観察実験と同様、(b)杭ありのほうが(a)杭なしよりもすばやく移動していることがわかる。
謝辞
日本学術振興会 科学研究費補助金 学術変革領域(B)21H05104 (研究代表者:加納剛史)
日本学術振興会 学術研究助成基金助成金 国際共同研究(B)19KK0103 (研究代表者:加納剛史)
東北大学人工知能エレクトロニクス卓越大学院プログラム (三上大志)
用語説明
注1. 数理モデリング:現象のしくみを理解するために、現象を数式で表すこと。
注2. イトミミズの塊:正確には、本研究の実験で使用したイトミミズの塊は、イトミミズ亜科に属するユリミミズ、ウィリーユリミミズが大多数を占める複数種で構成されている。
注3. 群ロボット:ある作業を行うために協調して動作する複数台のロボット。次の3つのメリットがある。①負荷の分散や環境に応じた担当変更が容易な「柔軟性」、②一部のロボットが故障しても他のロボットが代わりになれる「頑強性」、③ロボットの台数が増減しても安定して機能する「拡縮性」。これらのメリットを生かすことで、探索や搬送、同時分業が得意と言われている。
論文情報
- タイトル:Elongating, Entwining, and Dragging: Mechanism for adaptive locomotion of tubificine worm blobs in a confined environment
- 著者:Taishi Mikami, Daiki Wakita, Ryo Kobayashi, Akio Ishiguro. and Takeshi Kano*
*責任著者:東北大学電気通信研究所 准教授 加納剛史
- 掲載誌:Frontiers in Neurorobotics
DOI:10.3389/fnbot.2023.1207374
参考文献
[1] Nguyen, C., Ozkan-Aydin, Y., Tuazon, H., Goldman, D. I., Bhamla, M. S., and Peleg, O. (2021). Emergent collective locomotion in an active polymer model of entangled worm blobs. Frontiers in Physics 9: 734499.
[2] Ozkan-Aydin, Y., Goldman, D. I., and Bhamla, M. S. (2021). Collective dynamics in entangled worm and robot blobs. Proceedings of the National Academy of Sciences 118, e2010542118
[3] Hamann, H. (2018). Swarm robotics: A formal approach, (Springer)
動画 URL
【お問い合わせ先】
<研究に関すること>
東北大学電気通信研究所
准教授 加納剛史
TEL: 022-217-5465
E-mail: tkano*riec.tohoku.ac.jp
<報道に関すること>
東北大学電気通信研究所総務係
TEL: 022-217-5420
E-mail: riec-somu*grp.tohoku.ac.jp
広島大学 広報室
TEL:082-424-3749
E-mail:koho*office.hiroshima-u.ac.jp
(注: *は半角@に置き換えてください)

 Home
Home