 Home
Home本研究成果のポイント
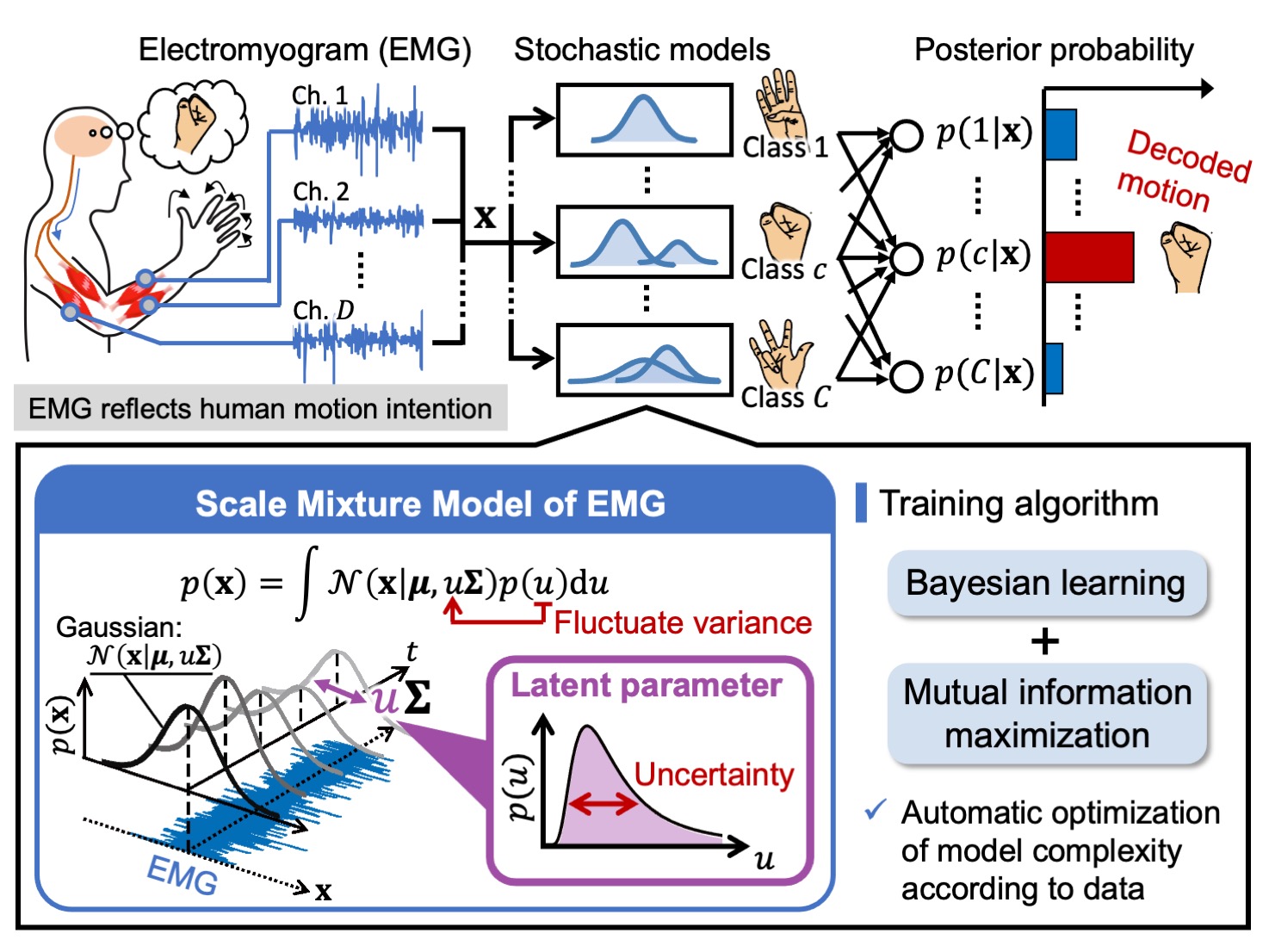
〇筋収縮時に発生する筋電位信号から、人の動作意図を高精度に推定可能なパターン識別法を提案した。
〇提案法は、確率的生成モデルを内包しており、筋電位信号の分散を潜在的な確率変数として扱うことで、信号に含まれる不確実性を考慮したパターン識別が可能である。
〇提案法の学習には、変分ベイズ法による事後分布の近似推論と、相互情報量最大化に基づくハイパーパラメータ決定法を導入し、筋電位パターンの個人差に応じてモデルの構造や特性を最適化することができる。
〇複数の筋電位データセットを用いた実験の結果、提案法が一般的なパターン識別器よりも識別精度・計算コストの面で優れていることが示された。
概 要
筋収縮時に発生する表面筋電位信号は、人の内的状態を反映していることから、ロボット義手やリハビリ機器の制御信号として利用されてきた。このような筋電位信号に基づく制御システムを実現するためには、計測した筋電位パターンから人の動作意図を精度良く認識する必要がある。一方、筋電位信号の分散には、筋活動の不確実性に起因するばらつきが含まれることが知られており、従来の筋電位パターン識別法ではこの現象を十分に考慮することができなかった。そこで本研究では、この筋電位信号の不確実性を尺度混合確率モデルとして表現し、筋電位パターン認識へと応用する。提案法では、筋電位信号の分散を潜在的な確率変数として扱うことにより、筋活動に応じた不確実性を表現できる。また、変分ベイズ推論に基づく学習法を採用することで、学習過程でモデルの複雑さをデータから自動的に決定可能である。さらに、提案手法に含まれるハイパーパラメータを最適化するため、相互情報量最大化に基づく決定法を導入した。以上の学習上の工夫により、筋電位パターンの個人差に応じてモデルの構造や特性を最適化することができる。実験では、複数の筋電位データセットを用いて提案法の識別精度を検証した。その結果、提案法が一般的なパターン識別器よりも優れた識別能力を有することが示された。以上より、筋電位信号の確率的特徴を考慮した識別器を構築することで、高精度なパターン識別が可能である。