 Home
Home本研究成果のポイント
〇サンプリング定理により信号復元の限界として広く認識されている、ナイキスト周波数以上の周波数成分をもつ信号の制御に対して、信号の先見情報を利用し、適切な信号モデルを設定することで制御可能となることを示した。
〇リフティングと呼ばれる手法によりサンプル点間情報を保持したまま最適化を行うことを可能とし、さらにアップサンプリングにより近似的な超高周波信号トラッキングおよび外乱除去が精度良く実現できることを示した。
〇制御対象のモデル化誤差などの不確定性に対し本手法がロバスト性を有するための条件を導出した。
概 要
制御システムにおいて、制御される対象は連続時間で動作するのに対し、コンピュータを用いたデジタル制御の場合、観測や制御動作は離散時間で行われる。このようなシステムは、サンプル値制御系と呼ばれる。このような系では、連続信号のサンプリングが必須であるが、サンプリング定理により、ナイキスト周波数(サンプリング周波数の半分の周波数)を超える周波数成分をもつ信号の操作は不可能であるか、少なくとも極めて困難であるとこれまで理解されてきた。一方で、このような制御要求は実応用において多く存在している。
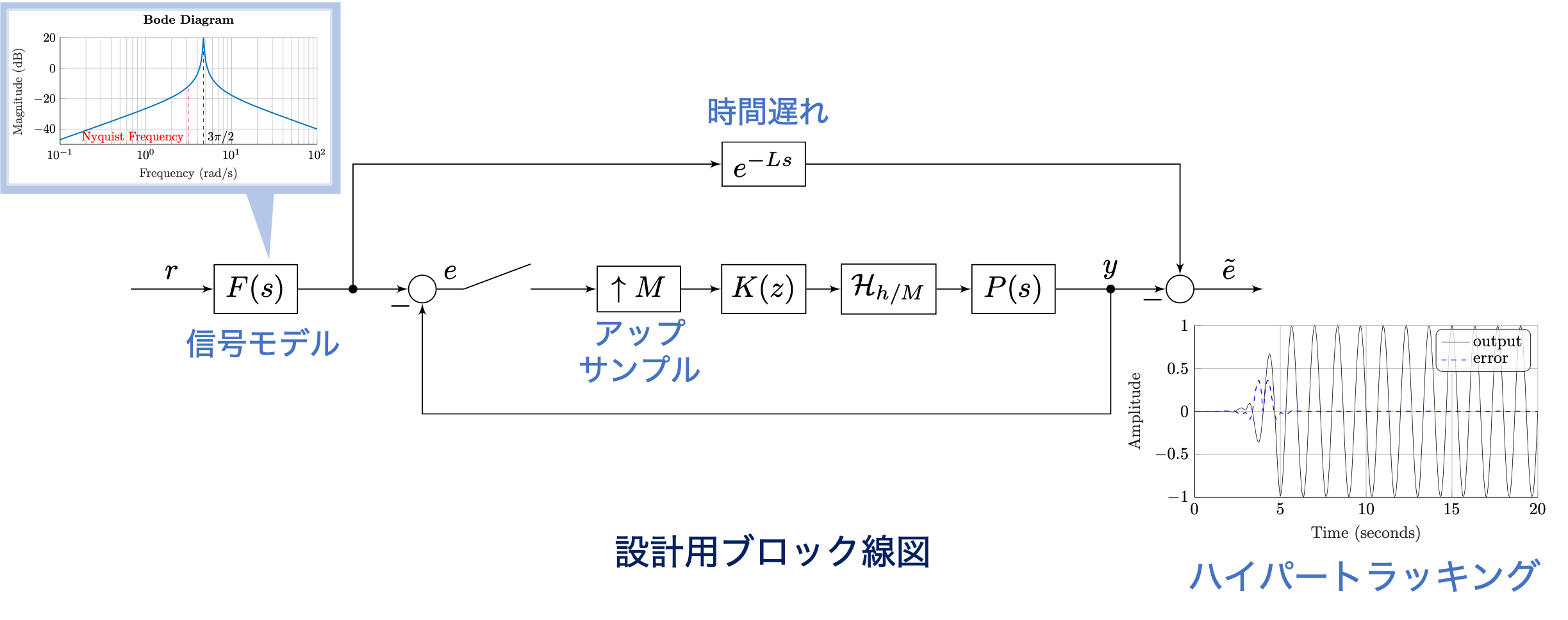
本研究では、サンプリング定理とサンプル値制御系における基本的な仮定を再検討することで、実際にはナイキスト周波数を超える信号の制御が理論上不可能ではなく、追従すべき信号、あるいは外乱信号の先見情報を利用し、適切な信号モデルを設定することで、上記の制限が取り除けることを示した。従来の枠組みでは扱うことのできなかった、これら超高周波信号トラッキング問題と外乱除去問題を、それぞれ新たにハイパートラッキングおよびハイパーリジェクションと呼ぶこととする。ハイパートラッキングおよびハイパーリジェクションの主要なポイントは下記である。
1. 参照信号あるいは外乱信号の先見情報から適切な周波数領域信号モデルを構築する。
2. 連続信号の離散化の際に、元の信号のモデルである連続関数を用いてサンプル点間挙動をモデル化する「リフティング」と呼ばれる手法を導入する。
3. 制御器が高周波成分を出力することを可能とするため、制御器へ入力される信号をアップサンプルする。
ポイント1と2により、サンプリングにより失われてしまったナイキスト周波数以上の信号成分を制御器設計に組み込んだ上で、サンプル点間応答を含めた最適化が可能となる。本研究では、サンプル値系H∞制御問題を解くことにより最適制御器を設計している。また、制御目的の達成までにいくらかの時間遅れを許容することにより、制御性能が格段に向上することを示した。
さらに、本研究では、制御対象のモデル化誤差などの不確定性に対して本手法がロバストであるためには、トラッキングの参照信号あるいは外乱信号の周波数と、上記の時間遅れが一定の条件を満たす必要があることを明らかにした。