 Home
HomeKey points of this research results
- In order to achieve high productivity in excavation work, excavation support control based on the combined center-of-mass(CoM) velocity of hydraulic excavator attachments is constructed.
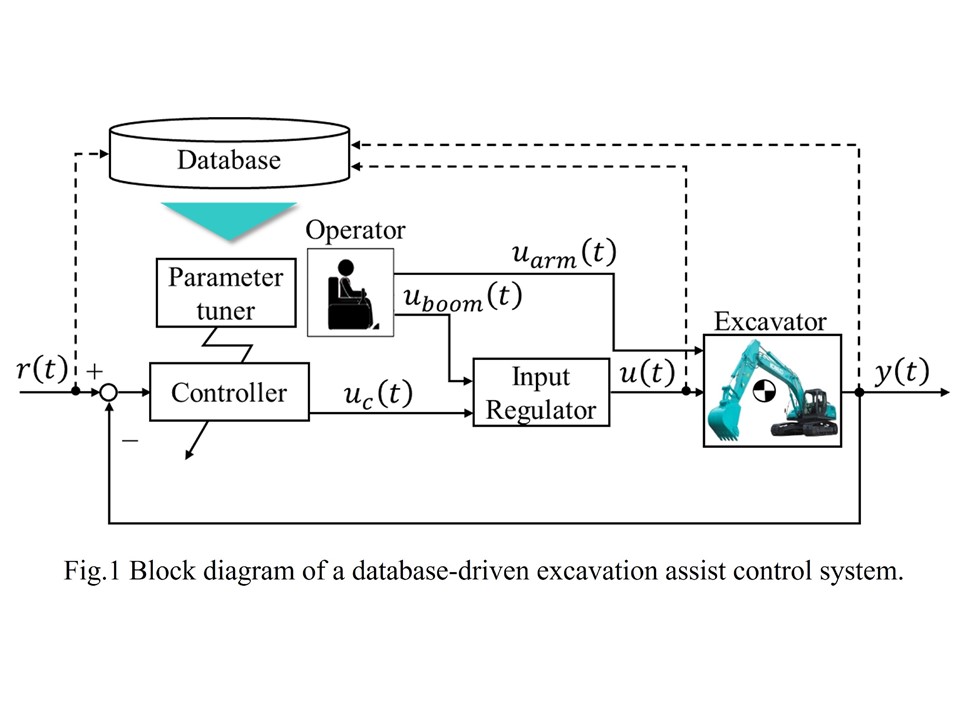
- The control system is based on the combined CoM speed of the attachment of the excavator, which enables smooth excavation work even by unskilled operators who are not good at adjustment operations, without compromising the operator's degree of freedom in operation. In particular, the introducing "database-driven control" makes it possible to effectively realize excavation support even if the system has nonlinearity due to equipment characteristics or the soil environment.
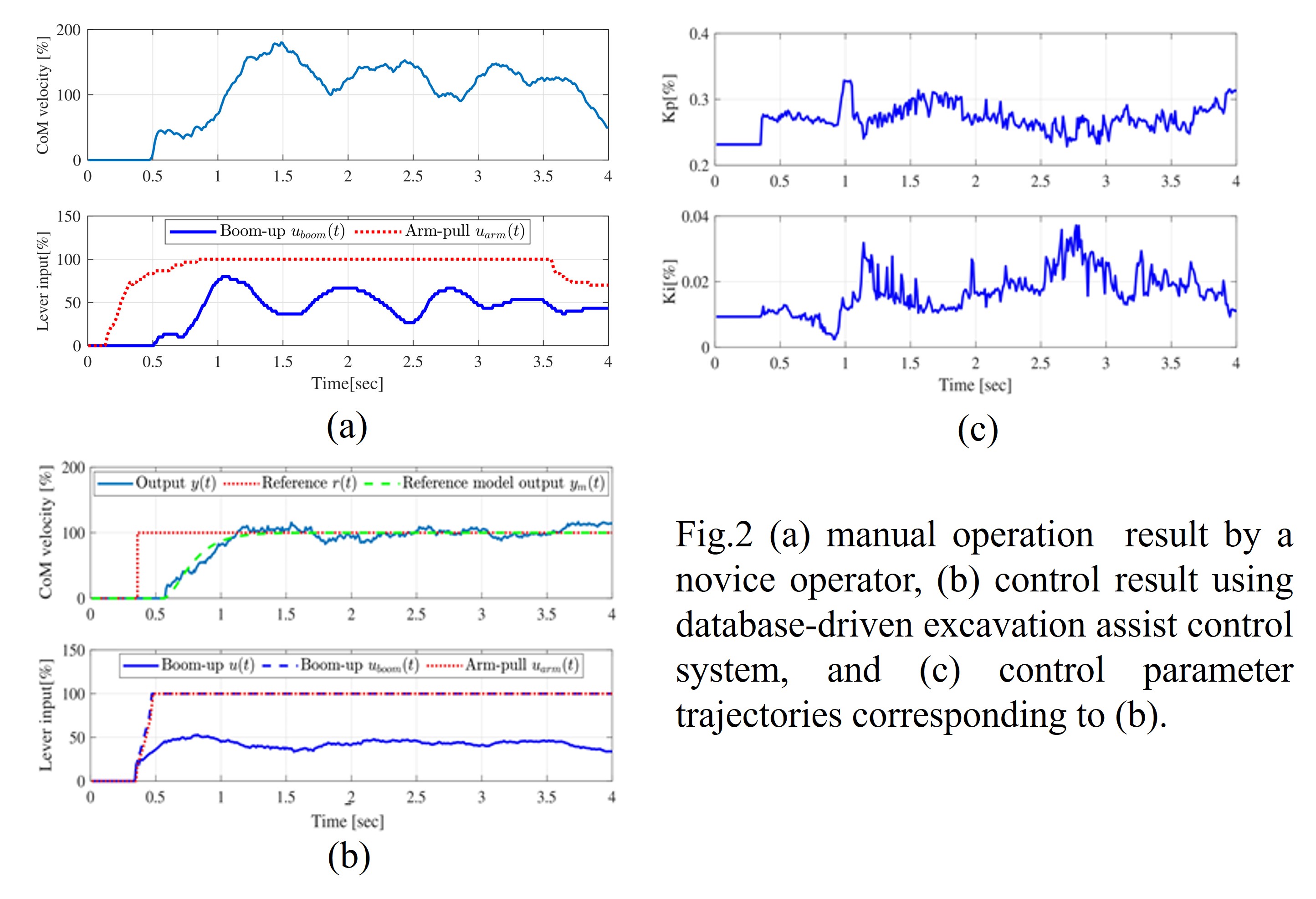
- The effectiveness of the "database-driven excavation support control" is verified by actually implementing it on a hydraulic excavator.
Outline
In recent years, the working population in the construction industry has been declining. However, the number of construction works is increasing because of the increase in development and infrastructure maintenance. Therefore, it is necessary to meet this increasing demand with limited resources. Productivity at construction sites is significantly improved through the extensive use of hydraulic excavators. However, productivity is affected by the skill of excavator operator. In addition, it is difficult and time-consuming to learn the operation of the machines required to achieve an efficient level of work. Therefore, novice operators need support to achieve high productivity.
In this study, the behavior of the combined center-of-mass(CoM) of the excavator attachment as an index that expresses the difference in operating characteristics of operators for hydraulic excavators is focused. In addition, a control system that assists the operation in excavation work based on the velocity of the combined CoM of the attachment is proposed. Furthermore, the database-driven control is applied to correspond to the nonlinear characteristics of a hydraulic excavator. The proposed method is implemented on a hydraulic excavator and its effectiveness is verified.