
 Home
HomeTEL:082-424-7677
E-mail:tsuji*bsys.hiroshima-u.ac.jp
(注:*は半角@に置き換えてください)
本研究成果のポイント
- 独自の筋シナジー理論注1に基づく動作識別法とインピーダンスモデル注2に基づくバイオミメティック制御法注3により、高精度かつ滑らかな動作を実現可能な筋電義手制御法を開発しました。
- 各指の独立した単一動作のみをシステムに機械学習させるだけで、学習を行なっていない多様な組み合わせ動作の制御に世界で初めて成功しました。
- 3Dプリンタ製パーツ、制御用マイクロコンピュータを採用することで、安価かつコンパクトな高機能筋電義手を実現しました。
概要
広島大学大学院工学研究科の辻敏夫教授、同博士課程後期2年の古居彬氏(日本学術振興会特別研究員)らを中心とする研究チームは、兵庫県立福祉のまちづくり研究所および近畿義肢製作所との共同研究により、独自の筋シナジー理論とバイオミメティック制御に基づく3Dプリンタ製高機能筋電義手の開発に成功しました。
筋電義手は、筋が収縮する際に発生する筋電位信号を用いて操作する電動義手であり、事故や病気で上肢を失った患者に対して処方されます。筋電義手の制御では、計測した筋電位信号から使用者が意図した動作や力の入れ具合を推定し、それらの情報に基づいて電動義手の各モータを制御します。そのため、人間の手に匹敵するような筋電義手を実現するためには、使用者の動作意図の高精度な推定と、推定された動作に基づく自然で滑らかな操作性の2つを同時に実現する必要があります。本研究の筋電義手は、独自に開発した筋シナジー理論に基づく動作識別法とインピーダンスモデルに基づくバイオミメティック制御を導入することで、これらの課題を解決しました。この方法は、各指の独立した単一動作のみをシステムに機械学習させるだけで、学習を行なっていない多様な組み合わせ動作を制御可能という世界で初めての技術的な特徴を有しています。また、このアルゴリズムはマイクロコンピュータ上に実装されており、義手を動かすために必要な機能が小型回路上で完結しています。さらに、義手本体のパーツは3Dプリンタを用いて印刷されており、高度な機能を備えている義手にもかかわらず、製造コストの削減およびメンテナンス性の向上にも成功しました。
本研究成果は、科学誌「Science Robotics online」に掲載されました。
2019年6月26日、本件について、広島大学東広島キャンパスにおいて記者説明会を開催しました。
用語解説
(注1) 筋シナジー理論:
人間が身体運動を行う際、個々の筋単位の制御で運動を実現しているのではなく、複数の筋の協調パターンである筋シナジーと呼ばれる少数の機能単位を組み合わせることで実現しているという仮説。
(注2) インピーダンスモデル:
力と運動の関係性を表す剛性、粘性、慣性といった機械インピーダンスを用いて、生体の身体運動特性をモデル化したもの。
(注3) バイオミメティック制御:
生体の有する機能や特性を機械システムに組み込むことで、生体を模倣するように人工物の制御を行う方法。生体模倣制御とも呼ばれる。
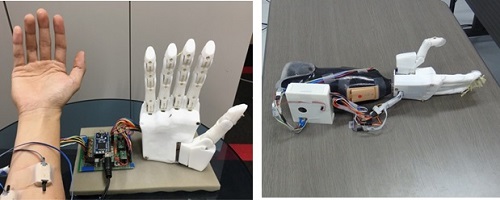
図: 開発した筋電義手のシステム全体像
本システムは、3Dプリンタ製の義手本体、マイクロコンピュータを中心とした小型制御回路、そして筋電計測用電極から構成される(左図)。上肢切断患者を対象とした実験を行うにあたり、専用の実験システムも構築した(右図)。
論文情報
- 掲載雑誌: Science Robotics
- 論文題目: A myoelectric prosthetic hand with muscle synergy-based motion determination and impedance model-based biomimetic control
- 著者: 古居 彬1、江藤 慎太郎1、中垣 光裕1、島田 恭平1、中村 豪2、増田 章人3、陳 隆明2、辻 敏夫1
1. 広島大学大学院工学研究科
2. 兵庫県立福祉のまちづくり研究所
3.近畿義肢製作所 - DOI: 10.1126/scirobotics.aaw6339
【お問い合わせ先】
広島大学大学院工学研究科
教授 辻 敏夫