
 Home
Home「ロボットアームを体験してみよう!」
去る2023年8月19日に高校生・大学生を対象としたロボットアームを体験するワークショップを、広島大学 学術・社会連携室 オープンイノベーション本部 産学連携部 バイオデザイン部門が行いました。
ロボットアームとは、人間の腕や手のように動作する機械的なアームのことを指す。ロボットも通常考える人型の機械ではなく、「すでにロボットを広い幅で捉えようとする考えは、今から15年ほど前、経産省から公表された政策で報告され、“センサー”・“知能・制御系”・“駆動系”の3つの要素技術を有する、知能化した機械システムだとされているのです」と部門長の花之内健仁(はなのうちたけひと)教授は話されました。
実際の医療現場(花之内教授は整形外科専門医であり、長年コンピュータ外科を専門とし関節治療を行ってきた)でもロボットアームが使用されている実例を用いて説明し、「今後、さらに高齢化社会が進み、人口減少も起こる我が国において、医療現場も同様で、様々な分野で利用される汎用型のロボットアームが利用されていくでしょうから、近い将来活躍するみんなに、基本的なロボットアームの動かし方をおぼえてもらいたい」という説明で、基本説明に入りました。

使用するのは、Dobot社の“Dobot Magician” 教育・研究用に利用される汎用型の4軸ロボットアームである。レクチャーを、花之内氏の前職時代の同氏の研究室に配属されていた後藤虎之介氏が担当しました。
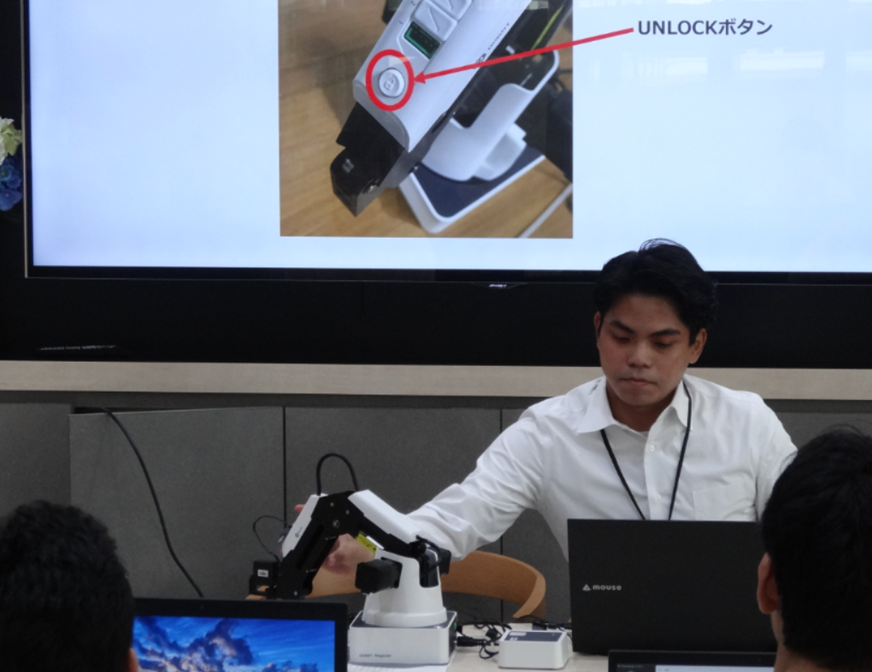
後藤氏は、現在大阪産業大学大学院工学研究科機械工学専攻に在籍する。花之内教授から、「医療現場では片手で超音波装置を使いながら、もう一方の手で手技を行うという難しい状況を行っている。これを、例えば超音波画像を機械学習で解析させ、ロボットの位置にフィードバックをかけていく研究はどうかな?」と言われたのが発端で、機械工学知識が活かせて、機械学習といった新しいテーマで研究をしているようです。
ロボットアームの動かし方としては、Direct Teaching ないしTeaching Playbackといって、実際ロボットアームを動かして任意の位置を記録させ、それを基に様々な位置にロボットアーム先端を移動させること、先端に吸引装置を取り付けることで、運搬物(ここでは小さな立方体)を動かすという方法を説明しました。またこの動かす方法を、初学者でも分かりやすいブロック状の命令系統を学習してもらいました。

ロボットアームを体験している最中に、超音波装置を用いて、模擬血管に注射針を刺入する実演を花之内教授から参加学生に行いました。

参加学生全員がロボットアームを体験できた後、このロボットアームで、医療従事者のどういった作業をロボットが代わりにできるかということについて、これまで取り組んできた研究の紹介を花之内教授にしてもらいました(中電病院に臨床工学技士(医療現場で工学知識を活かして医療機器を扱う仕事)として勤務される吉山潤一氏にもサポート頂きました)。
「今回のようにロボットができることがわかっているなど、ある程度工学技術に精通している状況でないと、今後医療現場で必要となるよう器械を考えて行けるようにはならないと思います。近い将来活躍するであろう若い皆さんに期待します」という言葉で、セミナーは盛会のうちに終了しました。

「今後も少人数をターゲットに催しを企画していく際に、このきてみんさいラボで行う際には、バイオデザインサロンとして開催していこうとか考えている」と花之内教授。今後の部門の活躍が期待される。