
 Home
Home広島大学フェニックス協力会
082-424-4302
techrd@hiroshima-u.ac.jp
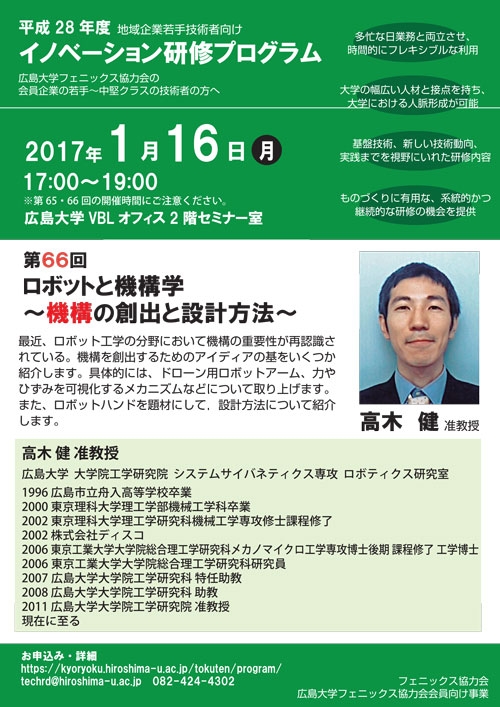
最近、ロボット工学の分野において機構の重要性が再認識されている。機構を創出するためのアイディアの基をいくつか紹介します。具体的には、ドローン用ロボットアーム、力やひずみを可視化するメカニズムなどについて取り上げます。
また、ロボットハンドを題材にして,設計方法について紹介します。
【日時】平成29年1月16日(月) 17:00~19:00 ※開催時間にご注意ください。
【場所】広島大学VBL オフィス2 階セミナー室
【講師】高木 健准教授 大学院工学研究院 システムサイバネティクス専攻 ロボティクス研究室
お問合せ